Blog del sitio
![]()

Título de la práctica:
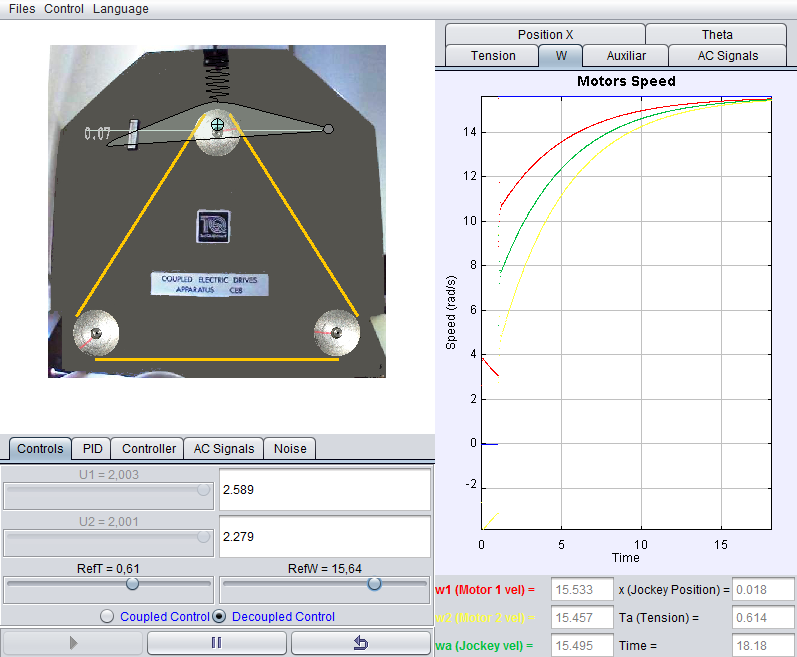
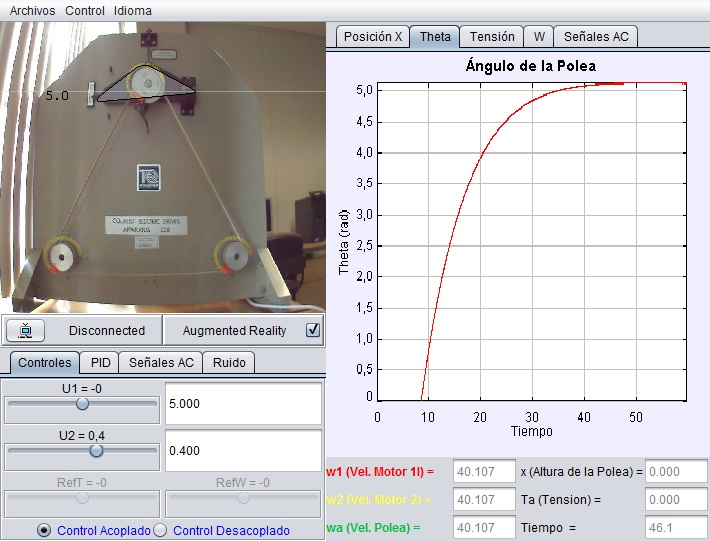
Control de tensión y velocidad de una cinta en un sistema de dos motores acoplados
El aparato tiene dos motores eléctricos, acoplados mediante una cinta flexible. La cinta pasa por una polea con un sistema que permite medir su velocidad y tensión. El problema de control principal es variar el torque de los dos motores para regular la tensión y la velocidad de la cinta. Esto puede hacerse de manera individual o simultánea. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Control independiente de la velocidad y la tensión de la cinta.
- Control simultáneo de la velocidad y la tensión de la cinta.
- Métodos prácticos para el control multivariable de sistemas electromecánicos.
Título de la práctica:
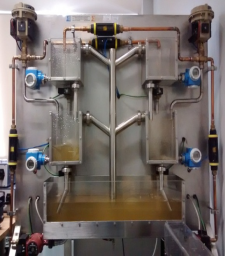
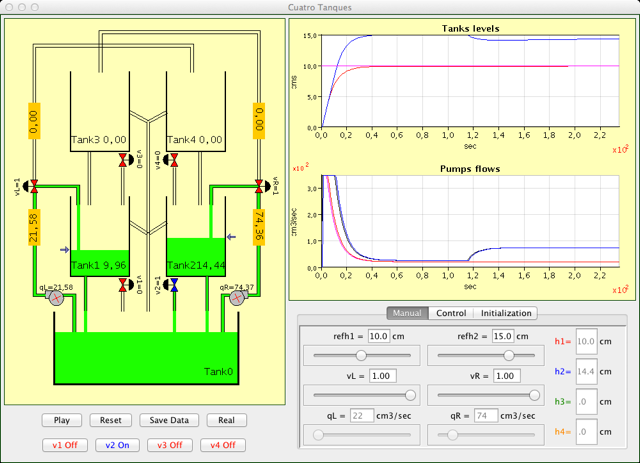
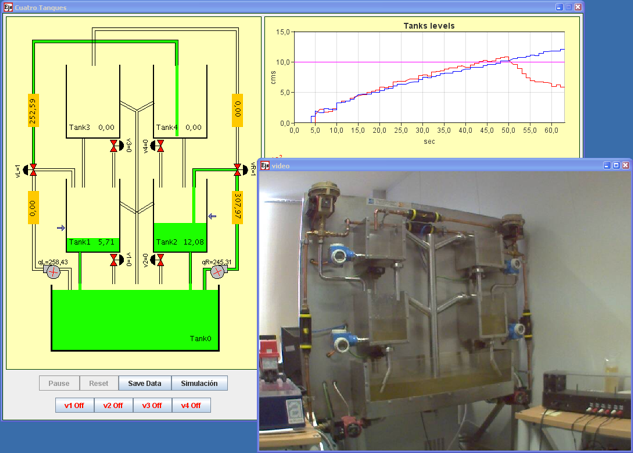
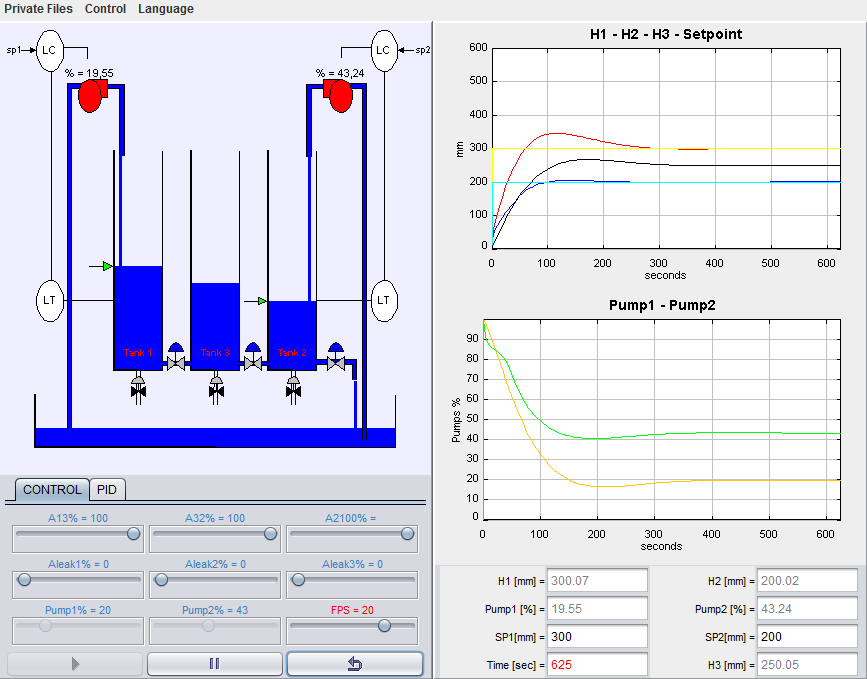
Control de nivel en una planta de cuatro tanques
El sistema de cuatro tanques es uno de los más famosos utilizados en la enseñanza del control multivariable. La planta consta de 4 tanques. Cada uno de ellos tiene en su parte inferior una salida de sección conocida, y otra salida con una sección desconocida, regulada por una válvula que permite activar o desactivar la correspondiente perturbación. Posee además dos válvulas de tres vías, que regulan que proporción del caudal, procedente de dos bombas, entra en cada uno de los tanques. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Estudio de las características dinámicas del sistema.
- Modelado del sistema mediante identificación.
- Diseño de un controlador multivariable para regular el nivel de un tanque.

Título de la práctica:
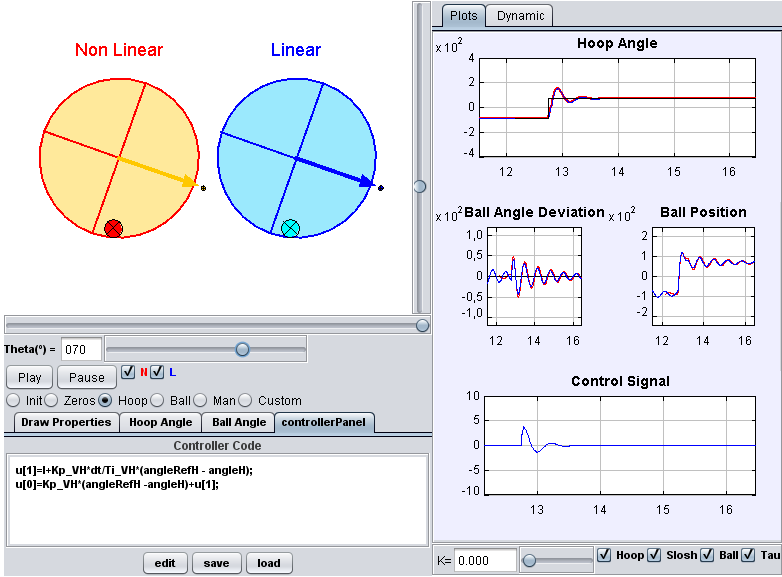
Control del sistema bola y aro
El de Sistema de Bola y Aro es un dispositivo electromecánico que está compuesto por una esfera de acero que puede rodar en el interior de un aro metálico. El aro está montado verticalmente en el eje de un servomotor; por lo que puede girar en torno a éste. El movimiento del aro provoca en la bola un movimiento oscilatorio hasta recuperar su posición inicial. La dinámica de la bola en el interior del aro es análoga a la dinámica de los líquidos en el interior de un contenedor cilíndrico. El principal objetivo de este sistema es controlar las oscilaciones de dicho líquido. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Estudio de las características dinámicas del sistema.
- Control de velocidad y posición del Aro, a través del control del motor.
- Control de desviación de la bola de su posición de equilibrio.

Título de la práctica:
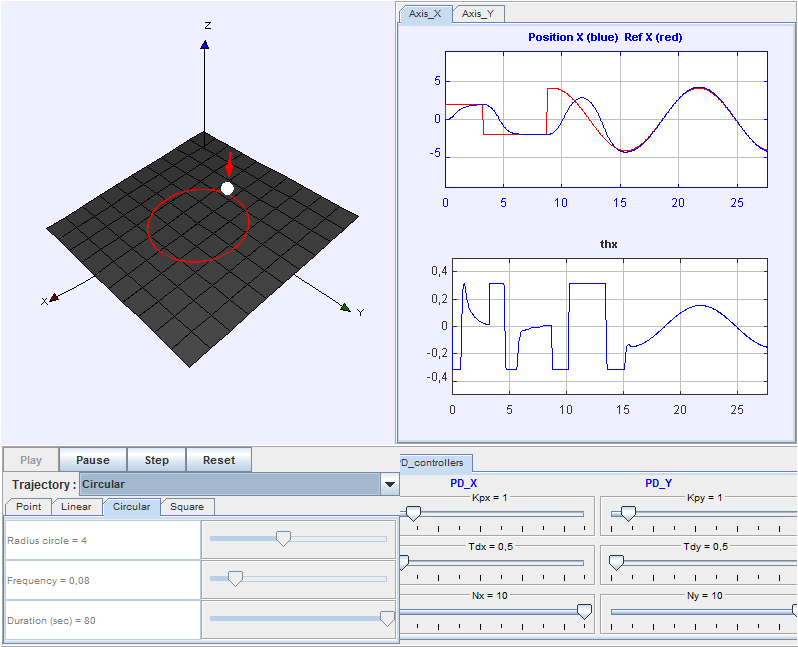
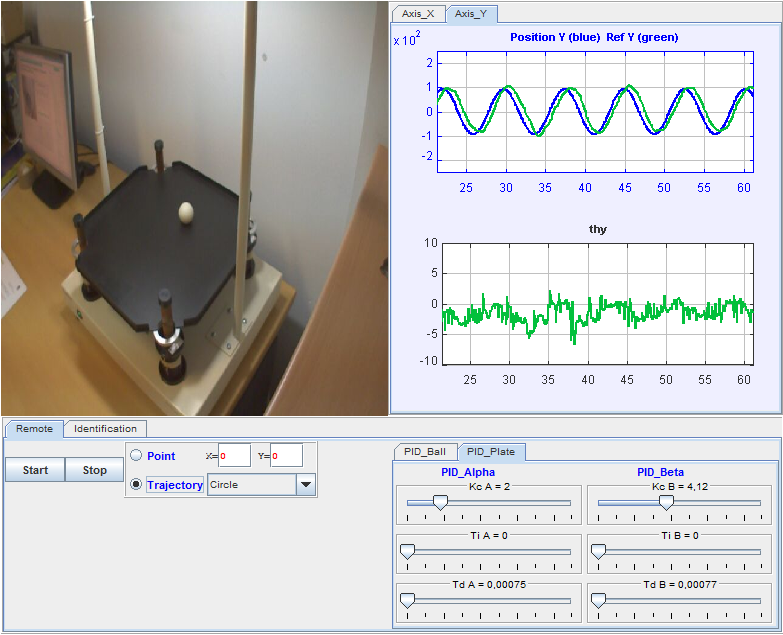
Control del sistema bola y plato
El sistema de Bola y Plato está compuesto por una esfera que puede rodar sin deslizarse encima de un plato de forma cuadrada. El objetivo del sistema es controlar la posición de la bola modificando los ángulos de inclinación del plato en ambos ejes. Este sistema es considerado como una extensión bidimensional del sistema de bola y viga. El sistema bola y plato se emplea en la industria aeronáutica para el desarrollo de simuladores de vehículos aéreos y terrestres. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Control de posición de la bola en un punto del plato.
- Control de seguimiento de trayectorias de la bola.

Título de la práctica:
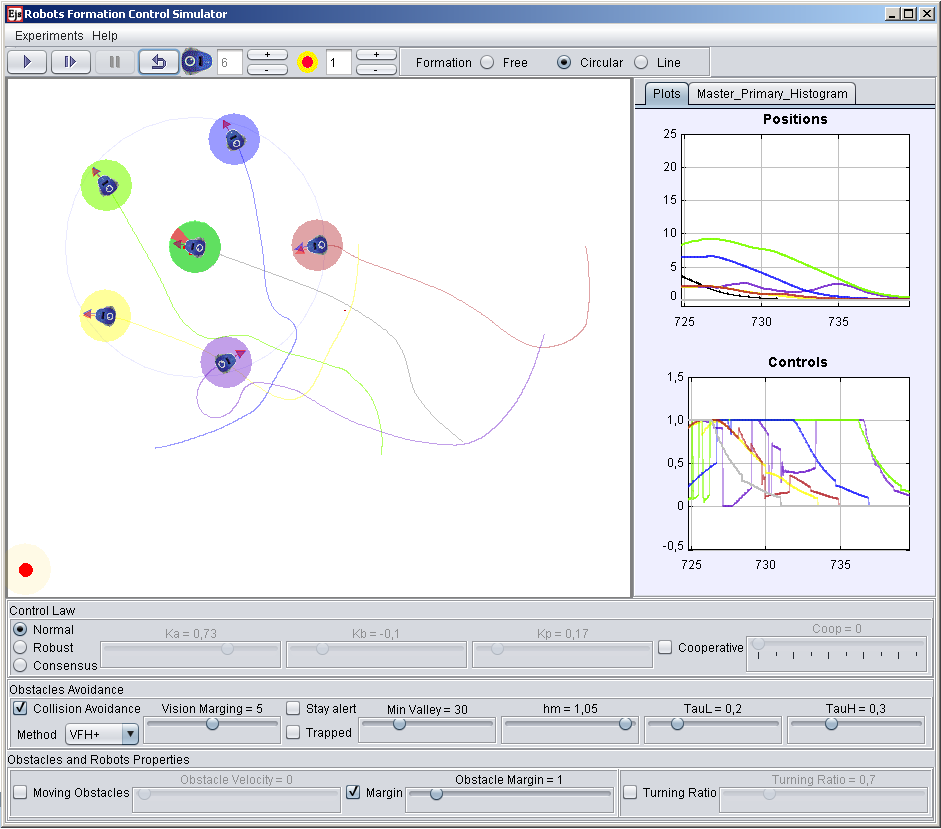
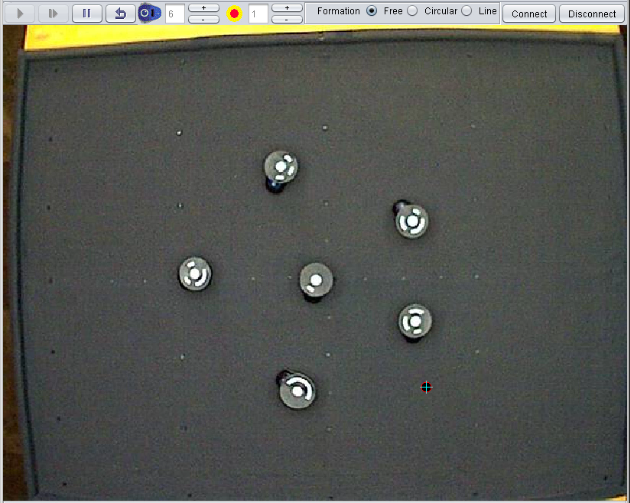
Control de robots móviles (sistema multi-agentes)
El laboratorio está basado en una plataforma multi-robots constituida por pequeños robots móviles con ruedas (Moway). Estos robots están formados por cinco módulos fundamentales: el sistema de procesamiento, el sistema motriz, el sistema de sensores e indicadores, el sistema de alimentación y el bus de expansión; mediante el cual se puede conectar un módulo de comunicaciones inalámbricas por radiofrecuencia (RF) y que permite a los robots comunicarse entre ellos. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Control de posición de un robot diferencial.
- Implementación de algoritmos de esquiva de obstáculos.
- Control de formación de un sistema multi-robots en un ambiente colaborativo.

Título de la práctica:
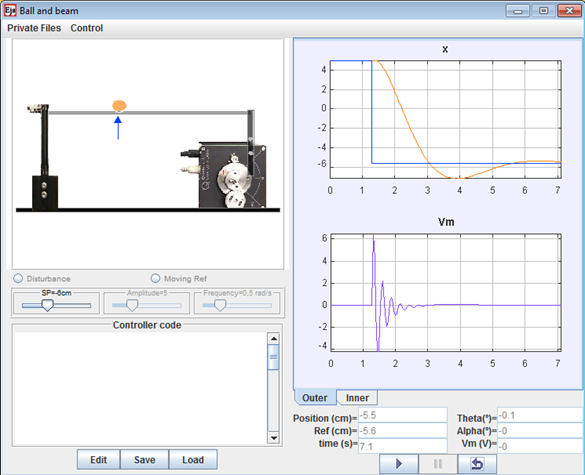
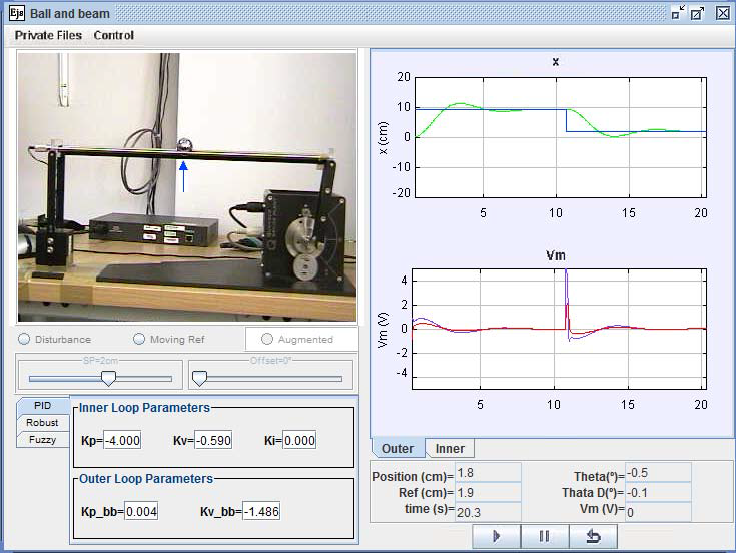
Control del sistema bola y viga
El sistema consta de dos subsistemas diferenciados: el módulo bola-viga y un motor equipado con un engranaje que se acopla a través de un brazo elevador al primer módulo. La viga consta de una vara de acero en paralelo con un cable resistor de níquel-cromo. Ambos forman el rail por el que rueda la bola. La posición de la bola en el rail se obtiene midiendo el voltaje en la vara de acero. El objetivo de control es llevar la bola a una posición deseada a lo largo de la varilla. Para ello, se obtiene la medida de la posición de la bola y del ángulo del motor a través de los sensores, y se aplican las señales de control al motor. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Estudio de las características dinámicas del sistema.
- Estudio y diseño de un sistema de control de la posición de la bola.

Título de la práctica:
Control no lineal de un péndulo de Furuta
El péndulo de Furuta es un dispositivo consistente en un péndulo invertido que pivota sobre una base giratoria. El giro de la base permite controlar la posición del pivote del péndulo y de forma indirecta la orientación del péndulo. Dicho dispositivo plantea retos de control interesantes ya que exhibe un comportamiento inestable (en la posición superior) y de "fase no mínima”. El objetivo de la práctica es desarrollar estrategias de control no lineal, lo que se lleva a cabo en los siguientes pasos:
- Desarrollar una ley de control capaz de mantener el péndulo en posición horizontal y hacia arriba mientras la base del mismo siguen cambios de consigna de posición. Para ello se usa la linealización en torno al punto de equilibrio.
- Implementar una ley de control capaz de "levantar” el péndulo desde la posición de equilibrio estable (péndulo hacia abajo) hasta su posición de equilibrio inestable (péndulo hacia arriba) con el objeto de aplicar posteriormente el control anterior

Título de la práctica:
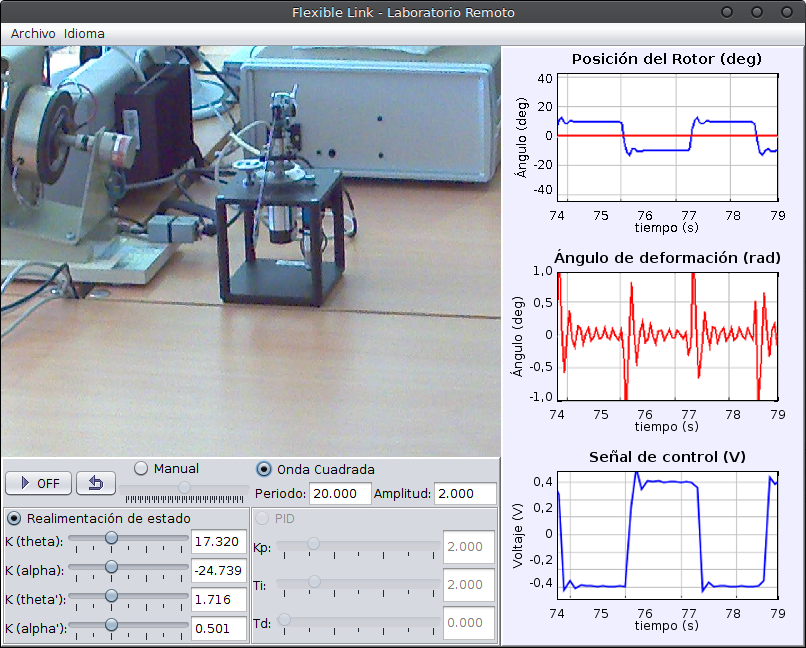
Control de posición y supresión de vibraciones de un brazo flexible
La planta consiste en un brazo metálico flexible, que está libre por un extremo, y unido por la base a un motor eléctrico. El problema de control principal es el posicionamiento del extremo del brazo flexible, al tiempo que se intenta suprimir o reducir las vibraciones que aparecen debido a la elasticidad del brazo. Los sensores incorporados en la planta permiten obtener medidas de la posición, velocidad del motor, y el ángulo de deformación del brazo flexible, medidos en la base de éste. La variable de control es la tensión de entrada al motor. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Control de posición con un controlador PID.
- Control de posición por realimentación de estados y control LQR.


Título de la práctica:
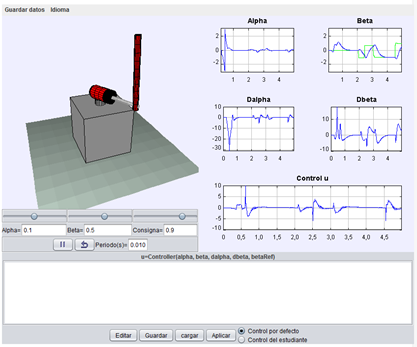
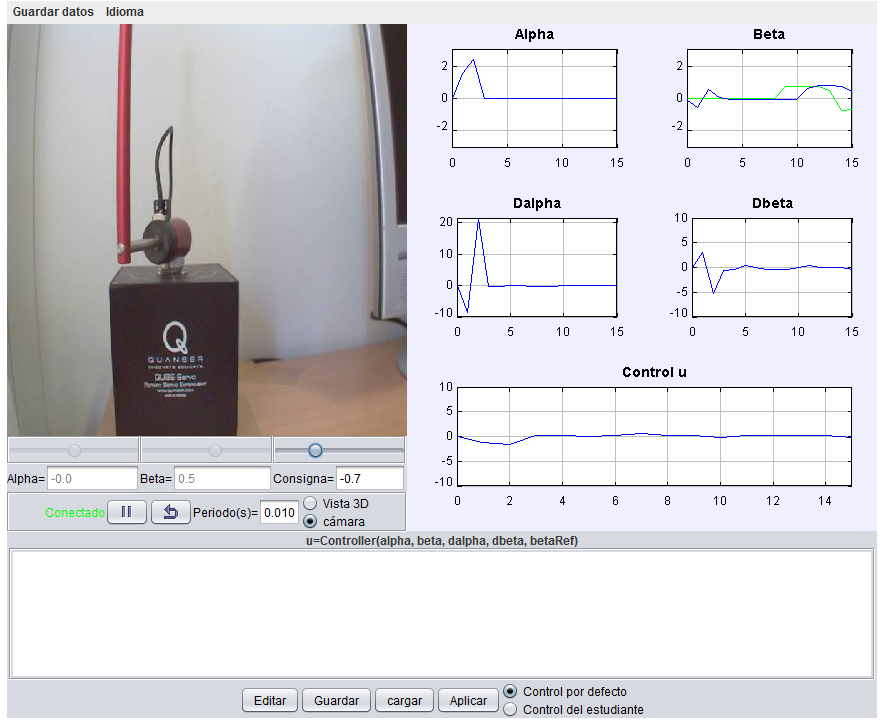
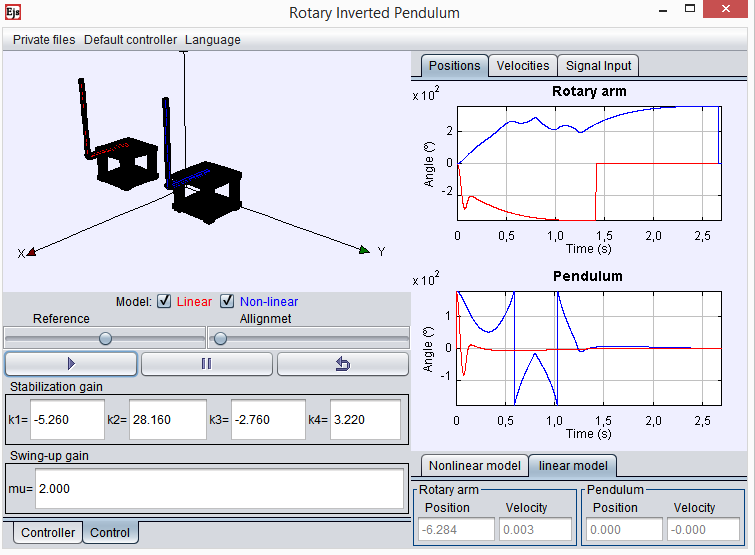
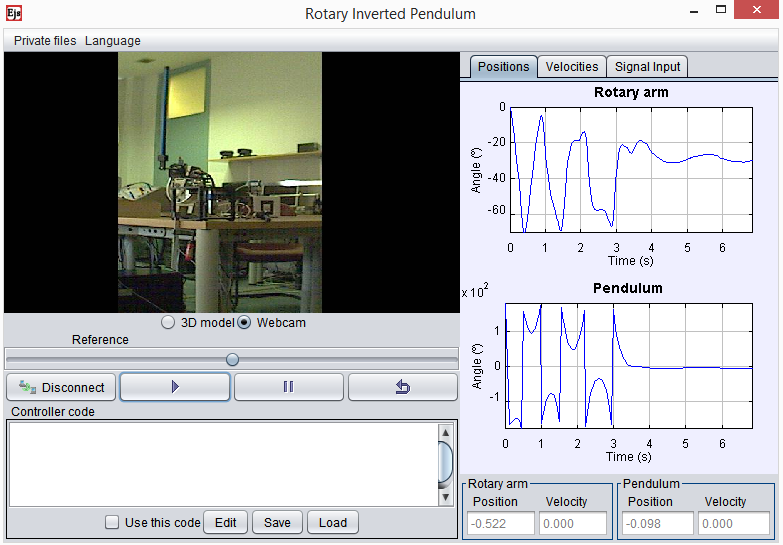
Control de un péndulo invertido
El péndulo invertido rotatorio consiste en un motor unido a un brazo rotatorio que puede moverse libremente 360º. El péndulo se conecta al extremo del brazo rotatorio y puede oscilar libre y perpendicularmente a éste. Se trata de un sistema fuertemente no lineal, inestable, de fase no mínima e infractuado, lo que lo convierte en un interesante caso de estudio. La variable de control es la tensión de entrada al motor. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Control no lineal para "levantar” el péndulo desde la posición de equilibrio estable hasta la posición de equilibrio inestable.
- Control lineal para estabilizar el péndulo en la posición de equilibrio inestable.

Título de la práctica:
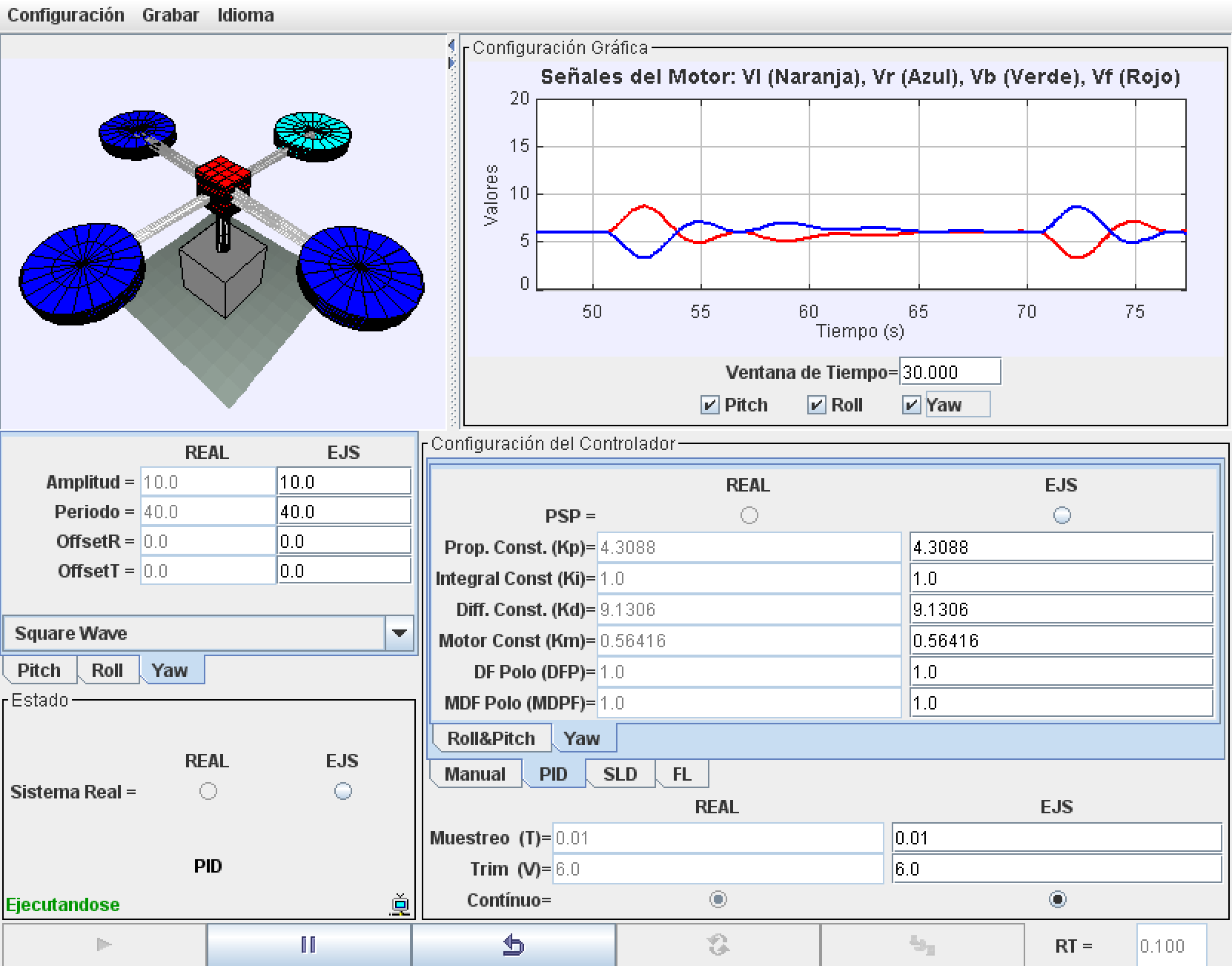
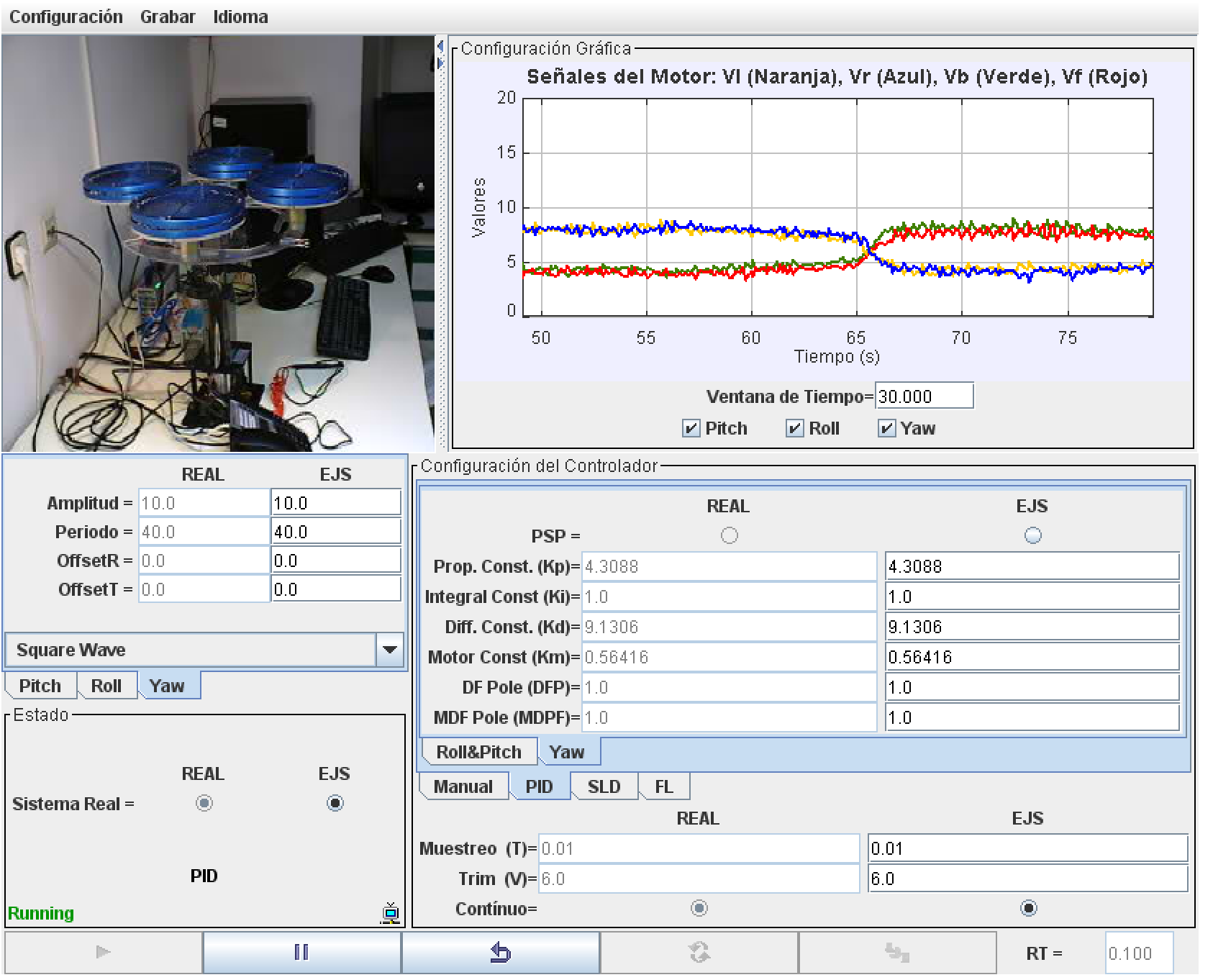
Control de un cuatrirrotor de 3 grados de libertad
La planta es un sistema no lineal formado por una estructura rígida que pivota sobre una articulación rotatoria de 3 grados de libertad (cabeceo, alabeo y guiñada) debido a la propulsión generada por 4 hélices acopladas a 4 motores. Los ángulos máximos de giro en cabeceo y alabeo están limitados a +-40º. La potencia suministrada a cada motor permite controlar de forma independiente la velocidad de giro de cada hélice, mientras que la orientación de la estructura rígida se mide a través de 3 encoders ópticos acoplados a cada eje. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Identificación del sistema.
- Diseño de controladores lineales: PID, realimentación de estado.
- Diseño de controladores no lineales: linealización por realimentación, por modos deslizantes.

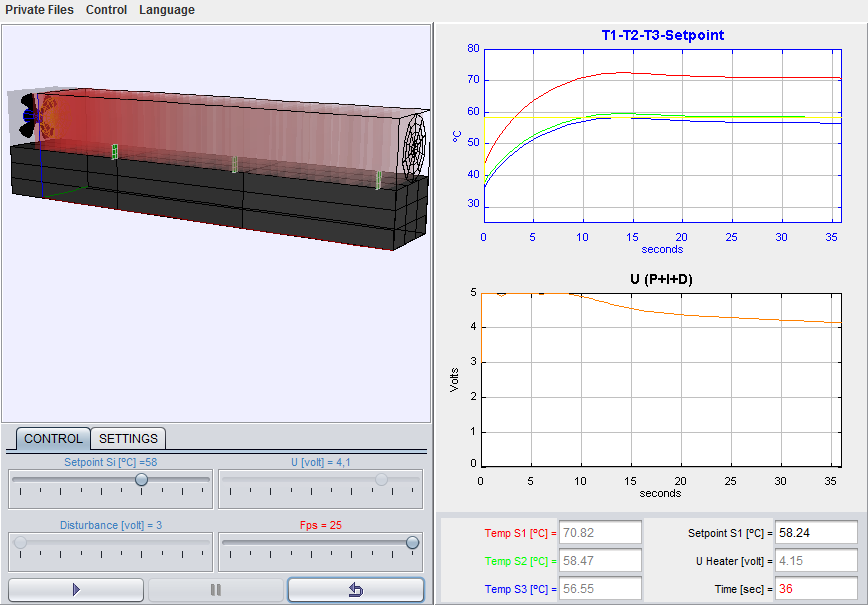
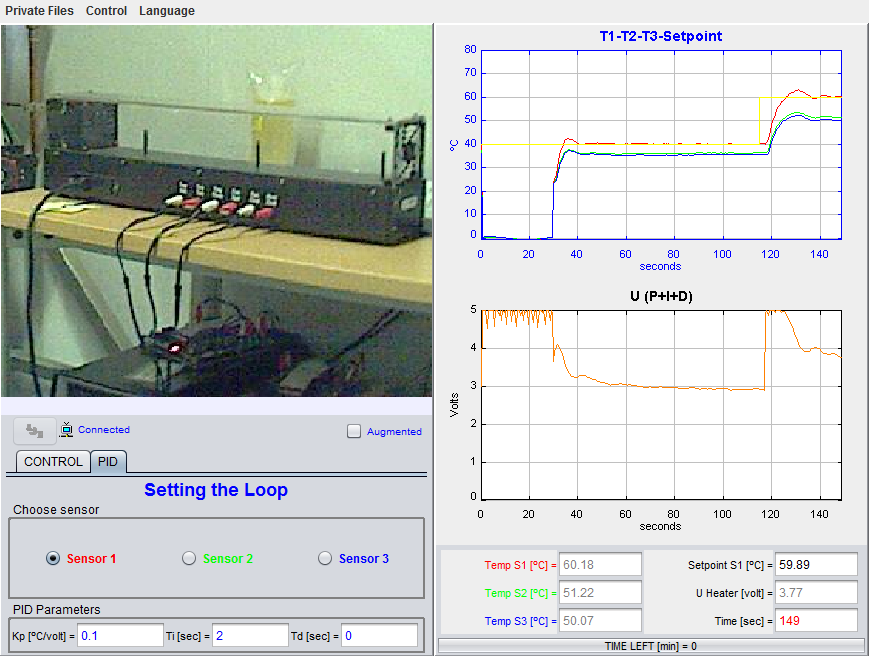
Título de la práctica:
Control de temperatura en un sistema intercambiador de calor
La planta consiste en una caja equipada con los siguientes componentes: un calefactor y un ventilador colocados en un extremo de la estructura y tres sensores de temperatura localizados en diferentes posiciones. La potencia liberada al calefactor y la velocidad del ventilador son controladas mediante señales analógicas. Para medir la temperatura se usan transductores de platino por su rapidez de asentamiento en la medición. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Estudio de las características estáticas y dinámicas del sistema.
- Experimentación y análisis de un sistema de control PI de temperatura.
- Estudio del efecto de las perturbaciones sobre el sistema real.
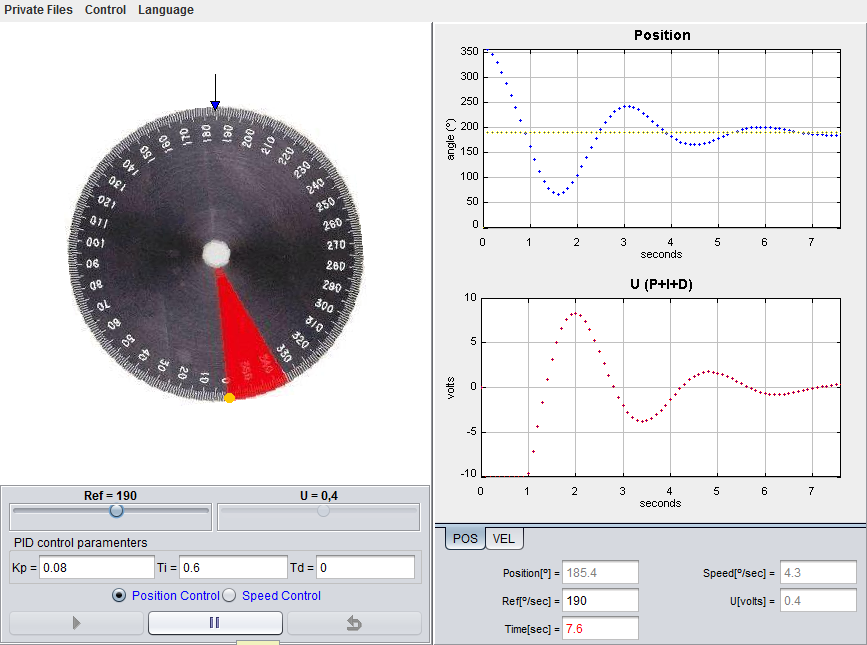
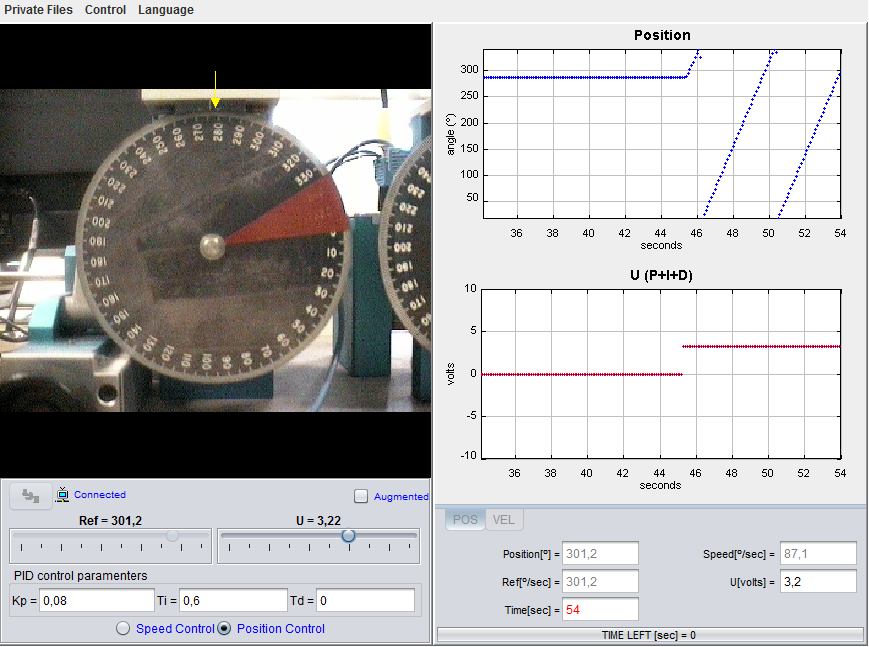
Título de la práctica:
Control de posición y velocidad de un motor de corriente continua
El sistema consta de un motor con un tacómetro empotrado. El motor impulsa un disco de acero como carga. Un freno magnético ajustable aplica un efecto de fricción viscosa, permitiendo por tanto la modificación de la constante de tiempo de este sistema de primer orden. La posición angular y la velocidad angular se controlan ajustando el voltaje aplicado al motor. La posición se mide con un potenciómetro conectado al eje del motor. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Estudio de las características dinámicas del sistema.
- Estudio y diseño de un sistema de control de velocidad.
- Estudio y diseño de un sistema de control de posición.

Título de la práctica:
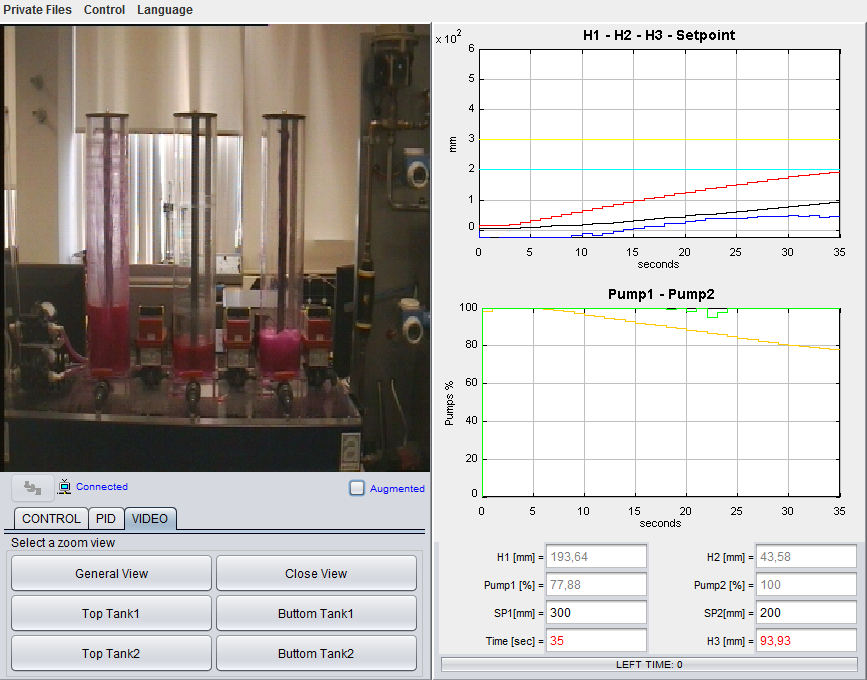
Control de nivel de un líquido en un sistema de tres tanques
La planta consta de tres depósitos cilíndricos o tanques. Los tres
depósitos están interconectados en serie y disponen de sus respectivas tuberías de descarga. El líquido que sale de los tanques se recoge en un depósito rectangular ubicado debajo de éstos. Este mismo depósito sirve de alimentación a las bombas que suministran líquido a los tanques de los extremos. Con este laboratorio pueden realizarse, entre otras, las siguientes tareas y actividades:
- Estudio de las características dinámicas del sistema.
- Experimentación y análisis de un sistema de control de nivel de líquidos.
- Estudio del efecto de las perturbaciones sobre el sistema.

Título de la práctica:
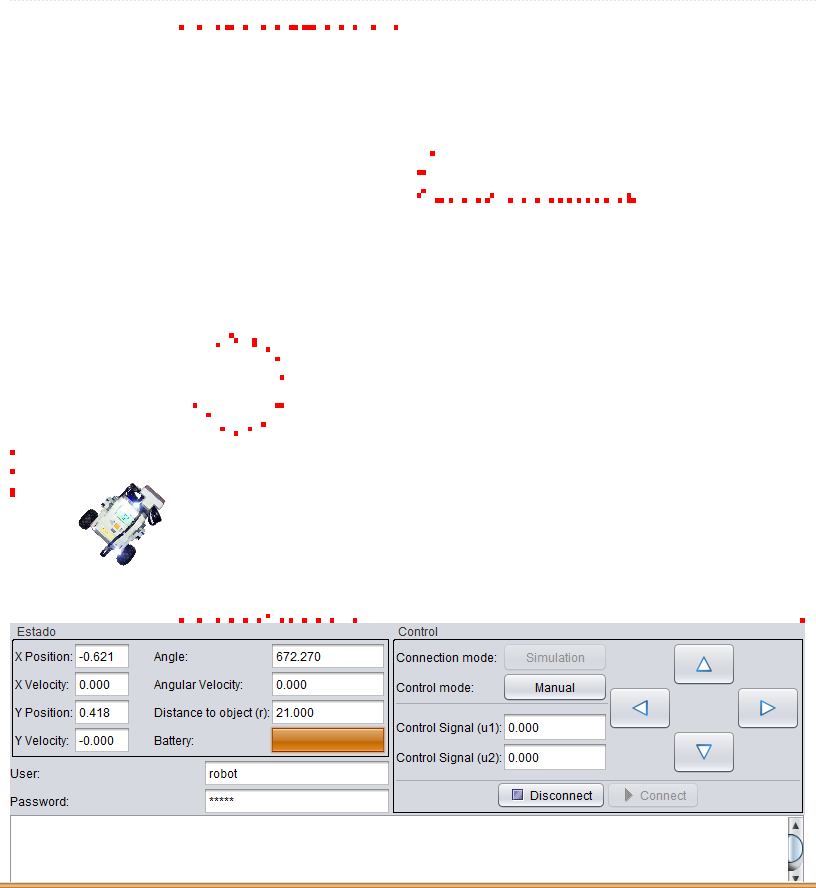
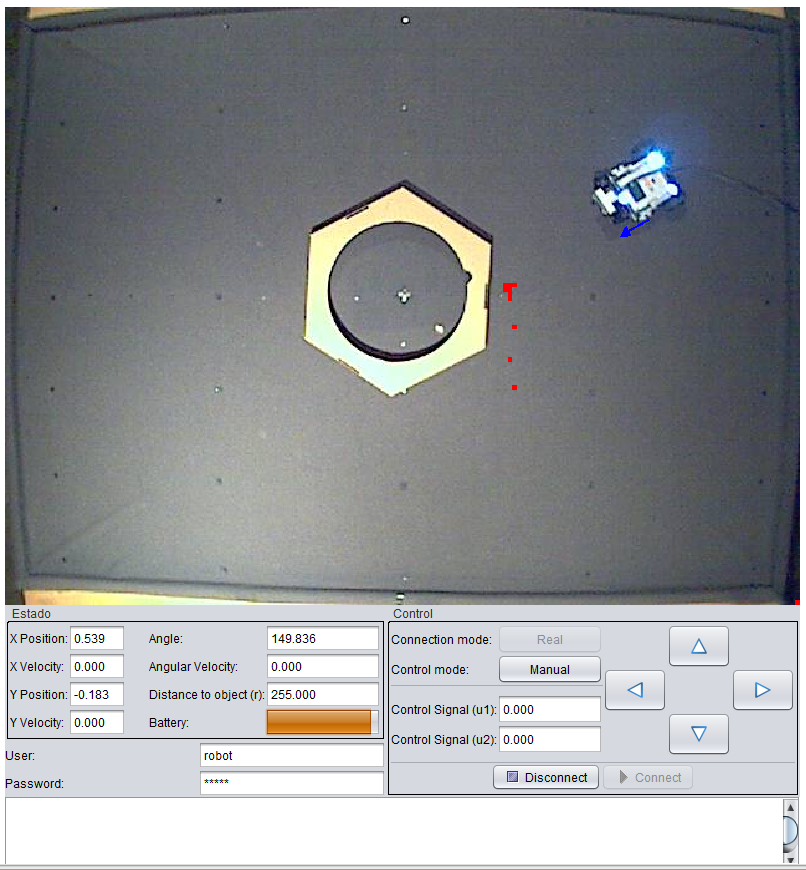
Control de un robot autónomo
En esta práctica se controlará un robot autónomo móvil subactuado con tracción diferencial con el objetivo de que éste localice los obstáculos que encuentre en su terreno de juego y dibuje un mapa del mismo. Concretamente, con este laboratorio pueden realizarse las siguientes dos tareas y actividades:
- Creación de mapas: En esta primera tarea el estudiante tendrá que desarrollar un mapa del entorno del robot basándose en los sensores externos del robot y en un sistema exógeno de posicionamiento absoluto por visión.
- Control de posición: En esta tarea se desarrollará un algoritmo de control de posición del robot que tenga en cuenta el mapa creado en la tarea anterior para la planificación de la trayectoria así como las lecturas de los sensores del robot con el fin de evitar colisiones.
More coming soon...
You want to add your own remote lab to our network? Visit our remote lab repository and do it with just a few clicks!
![]()
Trabaja con Laboratorios Virtuales y Remotos
UNILabs ofrece más de una docena de laboratorios virtuales que cubren distintos campos y temas como el Control Automátic y la Óptica. Cada uno de los laboratorios virtuales está basado en un experimento real especialmente diseñado o adaptado para hacerlo accesible y operable de manera remota. Estos laboratorios remotos también están disponibles en UNILabs.
Crea o Participa en Sesiones Colaborativas de Experimentación
Todos los laboratorios virtuales y remotos pueden usarse de un modo colaborativo. Los usuarios que participan en una sesión colaborativa de experimentación con uno de los laboratorios virtuales o remotos de UNILabs comparten la visualización del experimento y pueden todos actuar y operar el laboratorio por turnos. Las sesiones colaborativas pueden ser creadas bien por estudiantes o por profesores. Cuando lo hacen, primero seleccionan el laboratorio para el cual desean crear la sesión colaborativa y después seleccionan los usuarios a los que desean invitar a participar en la sesión.
Almacena tus Datos
Trabajar con laboratorios virtuales y remotos es sólo una parte del proceso de aprendizaje en un curso científico o técnico. Recoger datos de la experimentación y analizarlos es otra parte fundamental. Los laboratorios en UNILabs permiten a los usuarios grabar y almacenar online todos los datos importantes que pueden obtener de tal forma que los puedan usar luego para futuros análisis y/o la preparación de informes de laboratorio.
Graba o Carga el Estado de tu Laboratorio Virtual
Cuando trabajan con cualquiera de los laboratorios virtuales de UNILabs, los estudiantes pueden guardar el estado de sus experimentos. Pueden hacer esto en cualquier instante y el estado es almacenado en su propia área privada, en la nube. Esto les permite dejar de trabajar, salir de UNILabs y volver más tarde para retomar el trabajo desde el punto en el que lo dejaron.
Crea, Comparte, Graba y Carga Experimentos Predefinidos
Coming soon...
Trabaja con un Laboratorio Personalizado
Los laboratorios en UNILabs pueden ser personalizados. Si un profesor lo decide así, una misma simulación o laboratorio virtual puede usar un juego único de valores de algunos parámetros para cada estudiante. De este modo, aunque los estudiantes trabajan con el mismo laboratorio y estudian los mismos efectos y fenómenos, sus resultados son distintos debido a esta personalización. Como nota aparte, es importante resaltar que esta personalización se lleva a cabo de una manera automática y muy sencilla.
Sigue tu Propio Horario de Trabajo
Los laboratorios virtuales están siempre disponibles y cualquier número de usuarios pueden acceder a los mismos de manera simultánea sin ninguna restricción o limitación. Los laboratorios remotos en UNILabs también están disponibles 24/7 y el acceso a ellos se administra gracias al uso de un sistema de reservas. De estemodo, los usuarios pueden programarse su propio horario de trabajo.
Selecciona tu Idioma Preferido
Cuando se selecciona un idioma en UNILabs, no sólo se cambia el idioma en la interfaz web (los soportados actualmente son español, inglés y portugués), sino que las aplicaciones de los laboratorios virtuales y remotos también se muestran en el idioma seleccionado.
![]()
| ENLARGE es el sistema de gestión 4.0, creado por Nebulous Systems, utilizado en UNILabs para definir las conexiones de acceso a los laboratorios remotos, administrar y gestionar su uso a través de perfiles de usuario, permisos de acceso, etc. y para controlar el encendido y apagado de la alimentación de los equipos, iluminación, etc. | |
| La Universidad Nacional de Educación a Distancia (UNED) contribuye a la red UNILabs mediante el mantenimiento del servidor en el cual se aloja el portal Moodle. Así mismo, el Departamento de Informática y Automática, pone a disposición de esta red (y de la comunidad Moodle en general) un conjunto de plugins, conocidos como EJSApp, que permiten la fácil integración y administración de laboratorios virtuales y remotos, desarrollados en EJS, en la plataforma Moodle. | |
 |
La Universidad de Huelva es el principal desarrollador del sistema de acceso remoto a recursos de laboratorio (ENLARGE). Este sistema se pone a disposición de UNILabs para facilitar el establecimiento de comunicaciones entre los usuarios de esta red y los recursos y dispositivos físicos utilizados por los laboratorios remotos. |
 |
La Universidad de Murcia, por medio del Profesor Francisco Esquembre, aporta el programa de software libre y gratuíto conocido como Easy Java Simulations (EJS). Este programa es utilizado para crear las aplicaciones de los laboratorios virtuales de UNILabs, así como las interfaces de usuario para los laboratorios remotos. |
 |
La Universidad de Alicante es la responsable de añadir una funcionalidad de sincronización en tiempo real a las aplicaciones desarrolladas en EJS. Gracias a la combinación de este trabajo con el uso de los plugins EJSApp, UNILabs ofrece a sus usuarios la posibilidad de crear sesiones de trabajo colaborativo con los laboratorios virtuales y remotos. |
 |
La Universidad Complutense de Madrid aporta su experiencia y talento a la red de UNILabs con la integración de varios laboratorios virtuales y remotos del ámbito del control y la automática, enriqueciendo así la oferta de sistemas con los cuales se puede experimentar en este portal web. |
 |
La Universidad de Almería colabora dentro de la red de laboratorios de UNILabs mediante un curso online sobre control avanzado y un par de laboratorios virtuales y remotos relacionados con dicho campo. |